
Page 22 - Telebrasil - Julho/Agosto 1987
P. 22
E ü , R O B Ô
COMO RECONHECER OS ROBÔS
cada tarefa, o robô deve se adaptar, par
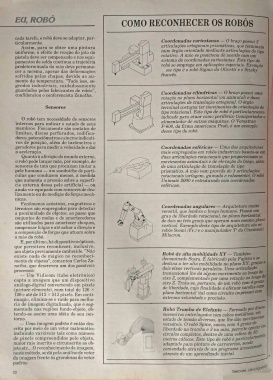
ticularmente. Coordenadas cartesianas — O braço possui 3
Assim, para se obter uma pintura articulações ortogonais prismáticas, que terminam
uniforme, o efeito de reação do jato da num órgão orientado mediante articulações do tipo
pistola deve ser compensado e nos equi rotativo. A mão se posiciona de acordo com um
pamentos de solda contínua a trajetória sistema de coordenadas cartesianas. Este tipo de
predeterminada da mão deve permane robô se emprega em aplicações especiais. Exemplo
cer a mesma, apesar das deformações sse tipo é o robô Sigma da Olivetti e o Sciaky
sofridas pelas chapas, devido ao au francês.
mento da temperatura. "Tudo isso, se
gredos industriais, cuidadosamente
guardados pelos fabricantes de robôs”, Coordenadas cilíndricas — O braço possui uma
confidenciou o conferencista Zanatha.
rotação no plano horizontal (ou azimutal) e duas
articulações de translação ortogonal. O órgão
Sensores terminal costuma ter movimentos de orientação cio
tipo rotacional. Este tipo de robô é particularmente
indicado para atuar como periférico transportador e
O robô tem necessidade de sensores alimentador de outras máquinas. O Versatran
internos para indicar o estado de seus F-600, da firma americana Prah, é um exemplo
membros. Fisicamente são contatos de desse tipo de robô.
limites, discos perfurados, codifica
dores, potenciômetros e sincros indicati
vos de posição, além de tacómetros e
geradores para medir a velocidade e daí Coordenadas esféricas — Uma das arquiteturas
a aceleração. mais empregadas em robôs industriais baseia-se em
Quanto à aferição do mundo externo, duas articulações rotacionais que proporcionam os
o robô pode lançar mão, por exemplo, de movimentos azimutais e de elevação do braço, além
sensores de tato que procuram imitar a de uma articulação de translação do tipo
pele humana — um sanduíche de partí prismático. A mão vem provida de 3 articulações
culas que conduzem menos, à medida rotacionais (arfagem, guinada e rolamento). 0 robô
que aumenta a pressão sobre a superfí Unimate 2000 é estruturado com coordenadas
cie externa dessa pele artificial — ou esféricas.
ainda vir equipado com sensores de des
lizamento ou de medição de forças mecâ
nicas.
Fenômenos acústicos, magnéticos e
térmicos são empregados para detectar Coordenadas angulares — Arquitetura muito
a proximidade de objetos, ao passo que versátil, que lembra o braço humano. Possui um
conjuntos de molas e de amortecedores grau de liberdade rotacional, no plano horizontal,
são utilizados para amortecer choques, de dois ou três graus que operam num mesmo plano
compensar folgas e até achar a direção e vertical. Exemplo deste tipo de arquitetura são os
a composição de forças que atuam sobre robôs Scemi (Fr.) e o manipulador T da Cincinnati
a mão do robô. Milacron.
E, por último, há dispositivos ópticos,
que permitem reconhecer, inclusive,
um objeto previamente conhecido. "Não
existe nada de mágico no reconheci Robô de alta mobilidade X Y — Também
mento de objetos”, comentou Carlos Za denominado Seara. É fabricado pela Fujitsu e se
natha, que descreveu um dos possíveis destina a ter alta mobilidade no plano X I. graça? &
processos: dois eixos verticais paralelos. Uma articulação
— Um Vidicom (tubo eletrônico) transacional lhe dá algum movimento ao longo do
capta a imagem que um dispositivo eixo Z, complementado por uma rotação ao longo o
análogo-digital convertendo em pixels eixo Z. Trata-se, portanto, de um robô com 4 grau~
(picture elements), num total de 126 x de liberdade, cuja finalidade é efetuar tarefas num
126 e até de 512 x 512 pixels. Em conti plano horizontal (tal como circuito impresso) com
nuação, elimina-se o ruído para melho extrema velocidade e precisão.
ria de imagem digitalizada, que é seg
mentada nas regiões fundo-objeto, ob- Robô Tromba de Elefante — Formado por disco.
tendo-se assim uma idéia de seu con sucessivos entrelaçados com cabos metálicos. em
torno. estado de tensão diversos, que lhe dão movimen -
— Uma imagem padrão é então des / versáteis. O robô Spine, sueco, com 4 graus de ^
crita por meio de um vetor matemático liberdade na tromba e 3 na mão, permite operm
incluindo variáveis tais como número I . círculos completos, dentro de uma esfera de
V •
de pixels compreendidos pelo objeto, metros cúbicos. Este tipo de robô é particuterm
maior raio inscrito e circunscrito ao ob adaptado para pintura de carrocerias, sendo
jeto etc... O reconhecimento da imagem, comandado através de um programa armazém
neste método, se dá pela análise de vetor através de um aprendizado inicial.
da imagem frente às grandezas do vetor
padrão.