
Page 24 - Telebrasil - Julho/Agosto 1987
P. 24
E ü , R O B O
Software
Mas é no terreno conceituai que re
side o grande segredo do robô. E Edson
Ferreira explica:
— Seja o gesto de alcançar uma
maçã. No caso humano, sabemos que a
máo se dirige "intuitivamente” e pegará
a fruta. Quando se trata de robôs é ne
cessário definir, em termos de coordena
das, o que a mão do robô irá fazer para
em seguida comandar cada ligação
(atuador) separadamente. Assim, são
calculados os movimentos elementares
de cada ligação que se comporão para
definir o movimento final da mão.
E como isso será calculado? Nova-
mentet Edson Ferreira dá a explicação: O robô ideal deveria ter a produtividade da fabricação em massa e a versatilidade do trabalho manual
— E necessário transpor a informa
ção da tarefa a cumprir (definida em re
lação à mão) em informações compreen nificando que para uma tarefa a ser rea quina — continuou explicando Edson
síveis para o comando de cada ligação. lizada pela máo devem-se definir as po Ferreira.
Para isso, lança-se mão do denominado sições sucessivamente assumidas por Na prática, há que se associar, a cada
modelo geométrico que é uma expressão cada elemento da máquina. elemento de um robô, um total de 12
analítica exprimindo a situação da máo, parâmetros: massa (1); centro de gravi
em função da configuração do robô. Controle dade (3); momento de inércia principal
Carlos Zanatha diz a mesma coisa de (3); e cruzado (3); resistência viscosa«1 >:
outra maneira, ao falar que 'as grande Mas a coordenação de movimentos é e atrito (1). Portanto, com um robô de 6
zas vetoriais do robô aparecem sob apenas um dos problemas fundamen graus de liberdade são necessários 72
forma de uma matriz, efetuando-se nela tais com que se defronta o projetista. parâmetros para defini-lo completa
transformações correspondentes à rota Outro importante aspecto de robótica mente.
ção e à translação de seus elementos”. é o do controle, que consiste em obri Surge então a equação de forças ge
Em suma, disse ele, a cada instante, as gar cada elemento a seguir a trajetó neralizadas, que é expressa em função
variáveis do robô podem ser representa ria ditada pela "coordenação de movi das coordenadas, das velocidades, da-
das a partir de transformações efetua mentos.” acelerações e de um vetor 0 que traduz,
das sobre a matriz representativa do es — O controle atua sobre os elementos para cada robô, a influência de seus
tágio anterior. Sabendo que cada ele do robô, obrigando-os a seguir uma re parâmetros físicos. Ao testar uma estra
mento de um robô e da carga tem um sis ferência qualquer. No entanto, o robô é tégia de controle, o operador propõe — a
tema associado de coordenadas é possí um ente real dotado de inércia e peso partir de forças e torques — uma acele
vel, matematicamente, passar de um (além de folgas, resistências viscosas e ração que o robô deverá alcançar ao se
elemento para outro, sem maiores difi atritos) que atuam como reações ao mo guir certa trajetória. A seguir, controla
culdades. vimento que lhe é imposto. Torna-se ne os erros de posição e de velocidade da1
Finalmente, efetua-se a "coordena cessário, então, definir um modelo dinâ resultantes. Para os técnicos, a aplica
ção de movimentos”, ou seja, o ato de in mico para aferir a influência destes fe ção in totum do modelo dinâmico se re
verter o modelo geométrico do robô, sig- nômenos físicos sobre o controle da má- vela um autêntico "abacaxi”, daí sur-
plificação. Existem alguns métod
para sua solução — todos difíceis.
O modelo de Newton Recursivo
é numérico) e bastante empregadopel
americanos requer cerca de 1600 ope) ¦St
ções de cálculo para um robô corr
nôicdb uu caua eieiueuw "
mado separadamente.
O modelo de Lagranje AnslRic
baseado no princípio da conservaça
energia potencial e cinética, Que’ ^
cado sem uma metodologia adeq 1
requer cerca de 80 mil operaçc*?- V
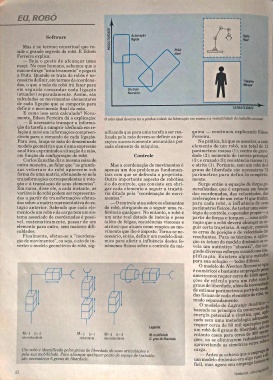
Legenda:
um robô de 6 graus de liberdade. Q í
M 2 G- 2 M = 2 G = 1 M - 3 G= 3 M- mobilidade
náo redundante redundante náo redundante
G- grau de liberdade
ções j w v O v U 1 1 1 LLil l CA 1 K s xa a ~ ~ robô
aproveitando as simetrias entre
Um robô é identificado pelos graus de liberdade de suas articulações e de
pela sua mobilidade. Para alcançar qualquer ponto do espaço de trabalho, - Antes se achava que o emp - jj,
são necessários 6 graus de liberdade. modelo dinâmico era alg°
, mas agora seu emprege